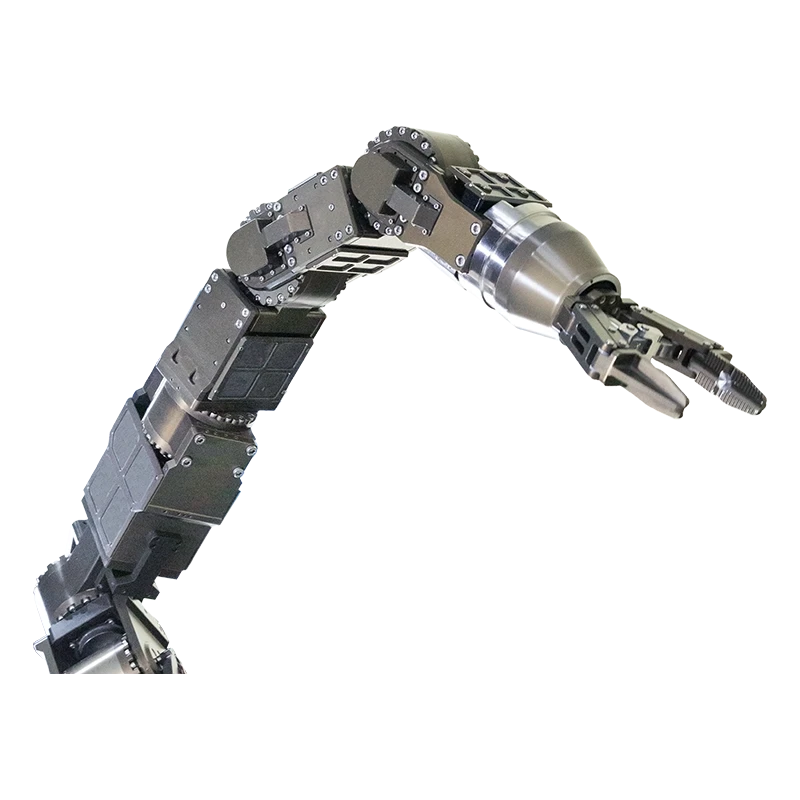
“Venus”humanoid deep-sea hydraulic manipulator
“Venus”humanoid deep-sea hydraulic manipulator is a highly integrated miniaturized hydraulic servo robotic arm. It features self-developed integrated hydraulic joints and an anthropomorphic arm configuration design, possessing six degrees of motion freedom and one gripper, capable of dual-arm coordination. It can be deployed in various urgent, challenging, hazardous, and critical scenarios such as deep-sea operations (3000 meters), emergency rescue, and the power industry, replacing human workers in performing precise and intricate tasks.
Functions:
6+1Materials :
Titanium AlloyOperation Pressure:
21MPaMaximum Lift:
20 kgWeight in Air :
25 kgJoint Control :
Integrated Joint Drive Control BoardExtended Depth:
3000 mswShoulder Azimuth:
120°Shoulder Elevation:
120°Elbow Rotation:
180°Elbow Pitch :
180°Wrist Pitch:
180°Wrist Rotation:
180°Gripper Openin :
100 mm
“Venus”humanoid deep-sea hydraulic manipulator is a highly integrated miniaturized hydraulic servo robotic arm. It features self-developed integrated hydraulic joints and an anthropomorphic arm configuration design, possessing six degrees of motion freedom and one gripper, capable of dual-arm coordination. It can be deployed in various urgent, challenging, hazardous, and critical scenarios such as deep-sea operations (3000 meters), emergency rescue, and the power industry, replacing human workers in performing precise and intricate tasks.